
Hopkins researchers apply systems-theoretic approaches to problems arising in the modeling, dynamics, sensing, navigation, and control of robots, autonomous underwater vehicles, wind farms, the electric power grid, teams of aerial robots, and spacecraft. We take a similar approach to modeling and analysis of naturally occurring systems such as crystals or large biological macromolecules made from many atoms, organelles made from many macromolecules, cells comprising many organelles, biological organisms comprising many cells, and populations comprising many organisms.
A systems-theoretic understanding of such systems often requires integrating across many such lengths and timescales, for which we apply many different mathematical techniques. These include modeling and analysis of deterministic and stochastic dynamical systems, designing feedback control and estimation algorithms, and developing autonomous navigation and motion planning techniques.
Specialties
- Dynamics and Control of Mechanical Systems
- Feedback Control and Estimation Algorithms
- Autonomous Navigation and Motion Planning Techniques
- Terradynamics
Faculty
-
Email:ncowan@jhu.eduPhone:(410) 516-5301
-
Email:dennice@jhu.eduPhone:(410) 516-5784

-
 Email:marin@jhu.eduPhone:(410) 516-5903
Email:marin@jhu.eduPhone:(410) 516-5903
-
 Email:Chen.li@jhu.edu
Email:Chen.li@jhu.edu
-
 Email:ssun@jhu.eduPhone:(410) 516-4003
Email:ssun@jhu.eduPhone:(410) 516-4003
-
Email:llw@jhu.eduPhone:(410) 516-6724

Affiliated Faculty
- Sridevi Sarma
- Rene Vidal
Affiliated Groups, Centers, and Institutes
- Laboratory for Computational Sensing and Robotics
- Robot and Protein Kinematics Laboratory (Chirikjian)
- Locomotion in Mechanical and Biological Systems (Cowan)
- Networked and Spatially Distributed Systems Research Group (Gayme)
- Autonomous Systems, Control, and Optimization Lab (Kobilarov)
- Terradynamics Laboratory (Li)
- Cell Mechanics Group (Sun)
- Dynamical Systems and Control Laboratory (Whitcomb)
“Animals, including humans, move with such grace and agility, and are able to adjust and change their movements and behavior according to what is happening around them. As engineers, we seek to learn from them while creating robust control systems that are safe and reliable. ”
 Noah Cowan
Professor of Mechanical Engineering
Noah Cowan
Professor of Mechanical Engineering
Systems, Modeling, and Control

Safety First - Using a $7.5 million, five-year grant from the U.S. Department of Defense, a multi-university team that includes Johns Hopkins engineer Noah Coawn is tackling one of today’s most complex and important technological challenges: How to ensure the safety of autonomous systems, from self-driving cars and aerial delivery drones to robotic surgical assistants.

Autonomous Underwater Vehicles for Water Quality Assessment - Detecting abnormalities in aquatic environments efficiently and quickly is crucial for environmental scientists and government authorities to study the problem and take action against environmental hazards. Marin Kobilarov’s lab researches the use of autonomous underwater vehicles (AUVs) and autonomous surface vessels (ASVs) that can aid in water quality assessment.

Teaching Robots to Suture, Swarm, and Explore - Inspired by real-world problems, students in Johns Hopkins University’s graduate-level Robot Systems Programming course build a full-scale robotics system that can perform at least two tasks, one of which must be done autonomously.
-


Researchers to try to figure out how Drosophila, the humble fruit fly, controls its movements so precisely and elegantly to inform the design of better robotic systems.
-
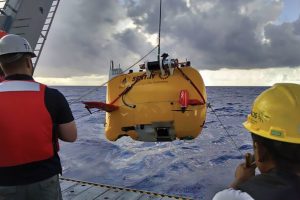
Deep down below
CategoriesFor almost three decades, Whiting School Professor Louis Whitcomb has developed tools and vehicles that enable oceanographers to explore once-unreachable depths.
-

"Safe autonomous systems are crucial for our society," said Noah Cowan, professor of mechanical engineering. "Our approach will integrate traditional mathematical control theory with new and emerging AI to make systems verifiable, robust, safe, and correct."