
Marin Kobilarov, an associate professor of mechanical engineering, develops intelligent robotic vehicles that can perceive, navigate, and accomplish challenging tasks in uncertain, dynamic, and highly constrained environments. He leads the Laboratory for Autonomous Systems, Control, and Optimization, which is part of the Laboratory for Computational Sensing and Robotics. Applications of his work include mobile robots, aerial vehicles, and nanosatellites.
He received his BS in Computer Science and Applied Mathematics at Trinity College in 2003 and a PhD in Computer Science at the University of Southern California in 2008. Prior to joining Johns Hopkins in 2012, he was awarded a Keck Institute for Space Studies postdoctoral fellowship and a United Technologies Research Center postdoctoral fellowship, and performed research in Control and Dynamical Systems at the California Institute of Technology.
-

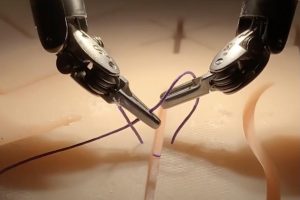
Breakthrough training system utilizing imitation learning opens 'new frontier' in medical robotics
-

Novel UAV platform combines custom hardware and neural networks for better pick-and-place operations