Noah Cowan’s cutting-edge research on mechanics and control in animals and machines—the neuromechanics of motion—is at the nexus of neuroscience and engineering. His innovations in robotics and discoveries in neuroscience are advancing both fields and may ultimately impact neuroprosthetics development and physical rehabilitation.
A professor of mechanical engineering, Cowan founded and directs Johns Hopkins University’s Locomotion in Mechanical and Biological Systems (LIMBS) Laboratory to further the study of neuromechanics, locomotion, control theory, system identification, and robotics. Cowan’s lab works across disciplinary boundaries with outstanding collaborators to make important basic discoveries about how the brain, often subconsciously, navigates our world and controls our bodies with precision and grace. LIMBS is part of JHU’s Laboratory for Computational Sensing and Robotics, for which Cowan served as deputy director from 2013 to 2018. Noah is also is a member of the Data Science and AI Institute.
Cowan’s team is known for research using exotic creatures such as the electric knife fish, a unique animal that cuts through the water like a knife’s edge while using electricity to navigate its murky surroundings, hide from predators, and catch prey—much like bats use sonar in the dark. His team is applying its understanding of locomotion in animals to build new algorithms and robotic devices.
Cowan, who was selected for a prestigious Presidential Early Career Award for Scientists and Engineers (PECASE) in 2010, holds secondary appointments in JHU’s departments of Electrical and Computer Engineering and Computer Science. He is the co-holder of three patents.
Among his many awards are the James S. McDonnell Foundation Scholar Award in Complex Systems (2012) and a National Science Foundation CAREER Award (2009). At Johns Hopkins, Cowan has been recognized with Discovery Awards in 2015, 2016, and 2023, the William H. Huggins Award for Excellence in Teaching (2004), and the Dunn Family Award for “an extraordinarily positive impact upon the lives of undergraduate students” (2014). At the 2006 Intelligent Robots and Systems Conference, he was a finalist for Best Paper. Cowan is deeply passionate about fostering a love of STEM among young people across the Maryland region. For more than two decades, he has served as a faculty mentor to high school students in his LIMBS lab for the Baltimore City Public School’s Baltimore Ingenuity Project and to Garrison Forest School students through WSE’s Whiting Internships in Science and Engineering Program (WISE). In 2013, he was a team leader for the STEM Achievement in Baltimore Elementary Schools (SABES) and a judge for the 20th Annual Undergraduate and Graduate Research Symposium at Morgan State University.
Cowan has been the keynote speaker at numerous regional meetings, as well as the 2015 International Conference on Advanced Robotics in Istanbul, Turkey. In 2007, he gave the first-annual “Early Career Spotlight” lecture for the Robotics: Science and Systems conference. He has served on several conference committees including as a scientific advisor to the International Consortium on Biomimetic Technology for Vibrissal Active Touch (BIOTACT), a general co-chair for the 15th International Conference on Climbing and Walking Robots (CLAWAR) in 2012, and a conference committee member for Living Machines (2012, 2013).
A Fellow of the IEEE, Cowan is also a member of the Society for Integrative and Comparative Biology, the Society for Neuroscience, and the American Association for the Advancement of Science (AAAS). He publishes widely in both scientific and engineering journals, including Nature, Proceedings of the National Academy of Science, Current Biology, eLife, IEEE Transactions on Robotics, International Journal of Robotics Research, Journal of Experimental Biology, and many others. Cowan is a frequent NSF panelist, served on an NIH Study Section in 2017, reviews for journals across multiple disciplines, and is a reviewing editor for eLife.
He received a bachelor’s in electrical engineering from Ohio State University (1995) and a master’s (1997) and a PhD (2001) in electrical engineering and computer science from the University of Michigan, Ann Arbor. After completing his graduate studies, Cowan completed a two-year postdoctoral fellowship at the University of California, Berkeley before joining the Hopkins faculty.
-

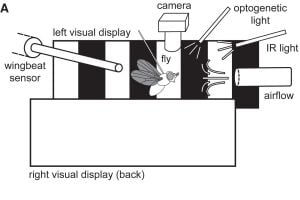
Team investigates how flies navigate their aerial environment, outperforming even the most advanced drones
-

Research incorporating robotics and medical applications earns NIH grant
-
Johns Hopkins team discovers visual motion clues alone help recalibrate your brain's internal GPS