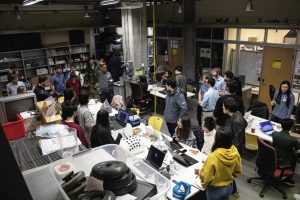
Students in the Haptic Interface Design for Human-Robot Interaction course, taught by John C. Malone Professor Jeremy Brown, learn how to design, build, and program haptic systems that bring the sense of touch to the virtual world. This semester, projects ranged from video games to prosthetic devices and medical training simulators. Check out photos from their final demos on Wednesday, December 11 in Hackerman Hall:
-

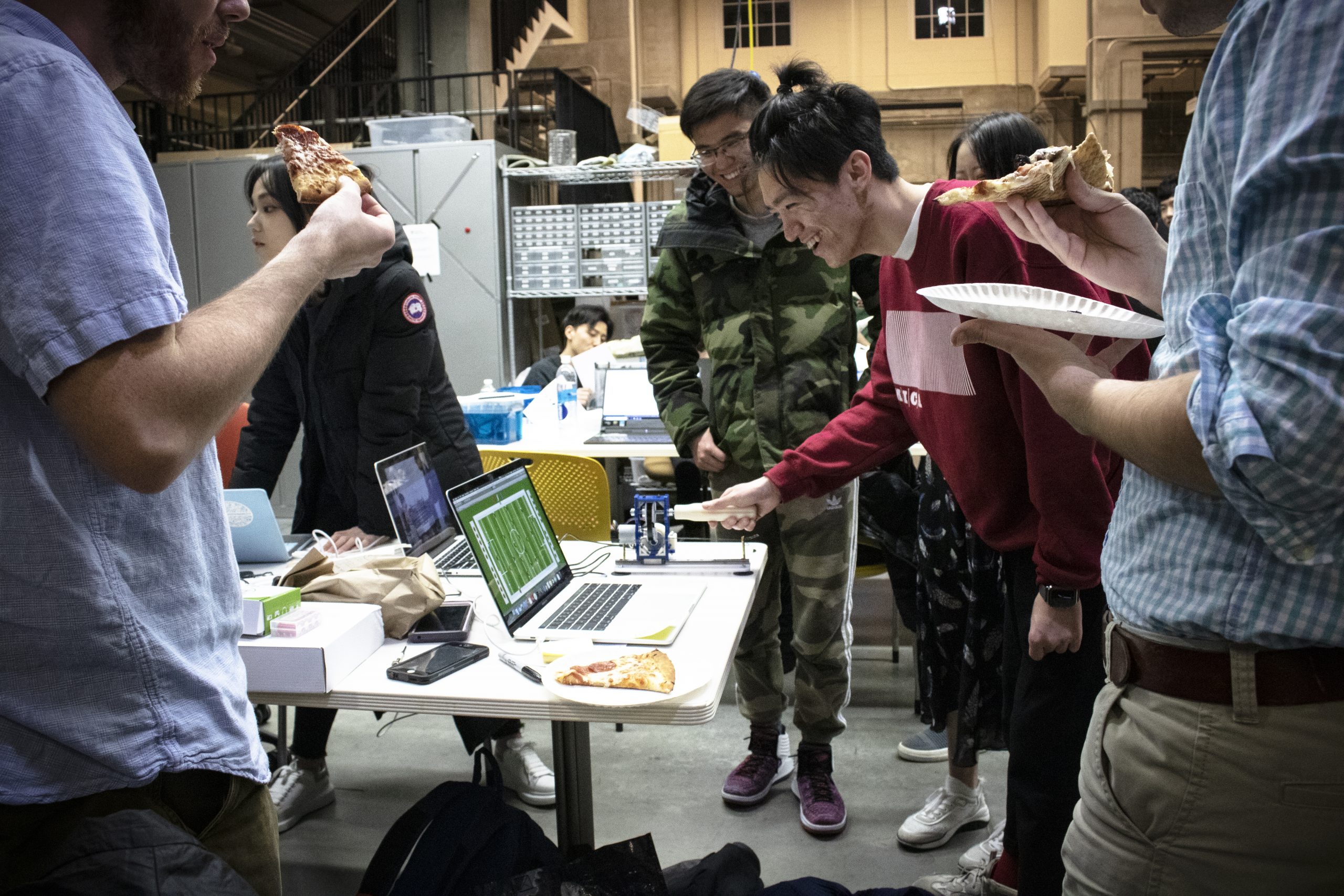
- Luke Robinson, Charlie Watkins, Seena Vafaee, and Justin Joyce with their virtual foosball game.

-

- I feel the need – the need for speed! Student tests out a racing simulator designed entirely by Hopkins engineering students.

-
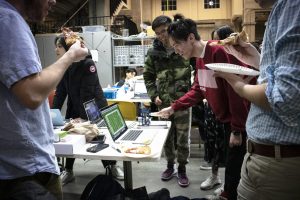
- Students try their hand at a virtual foosball game.
-

- Nikhil Morty, Nico Lamaison, Matthew Fernandez, and Maria Coleman developed a device to help patients who have lost the ability to sense pressure or touch due to peripheral neuropathy.

-
- Haptic Interface Design Final Demos

-

- Student demos a device that implements a motion monitoring and guidance algorithm to actuate forces that guide the user’s forearm either up or down, depending on the user’s rate of motion compared to the target velocity

-
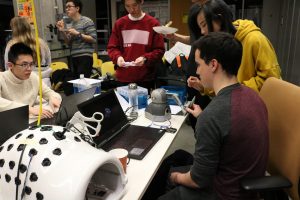
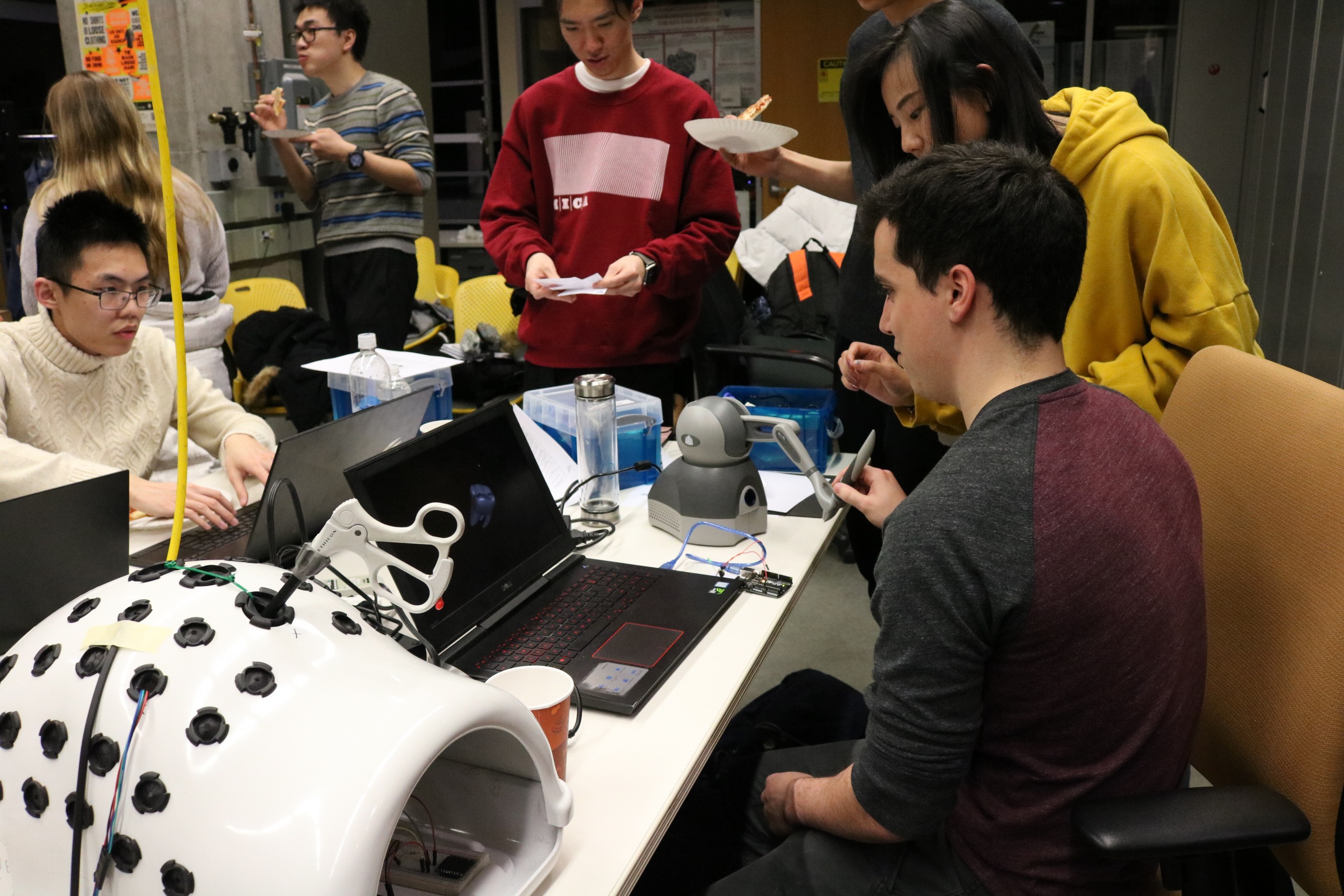
- Students designed a training simulator for dental students to explore a CAD model of a tooth and identify cavities. Users experience what a real cavity feels like via the haptic feedback sensors in the attached stylus.
-
- Student tries their hand at robotic surgery

-

- Novel haptic feedback device to address stiffness discrimination in patients with peripheral neuropathy.
