A team of Hopkins engineers, including MechE professors Noah Cowan and Thao (Vicky) Nguyen, has received a $2 million National Science Foundation (NSF) grant to build and program tiny, soft robots. The robots are expected to respond autonomously to environmental and physiological cues, an important step toward building soft robots that could travel through human bodies or machines repairing infections or defects. The grant was awarded through the Emerging Frontiers in Research and Innovation (EFRI) C3 soft robotics program, which funds “interdisciplinary teams of researchers to embark on rapidly advancing frontiers of fundamental engineering research.” MechE’s Cowan and Nguyen will join forces on the project with professors David Gracias (the project PI) and Rebecca Schulman, both from the Department of Chemical and Biomolecular Engineering.
“I’m excited to be part of such a world class team of collaborators,” said Cowan. “Our diverse expertise in chemistry, biology, mechanics, and robotics will enable us to build, model, program, and control soft microrobots in a way that no individual lab could achieve.”
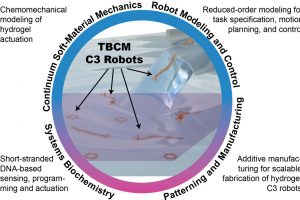
The Hopkins team seeks to develop thermobiochemically (TBCM) responsive robots made of water-based gels controlled by sequences of DNA molecules. These robots will be chemically programmed to perform certain tasks; for example, locating cargo, picking it up, and moving it to a designated location. The work will pave the way for the future development of soft robots free from external power sources like batteries, and that can be used in marine, biological, and medical settings.
The team plans to use molecular processes to integrate the traditional robotics challenges of sensing, actuation, and computation down to micron size scales—the robots’ features will be one-eighth the thickness of a human hair—eventually suggesting fundamentally new ways of organizing robots and solving problems faced at all scales within robotics.
While traditional robots rely on electronic sensors, actuators, and controllers, these submillimeter-scale TBCM robots will use chemical and thermal sensors, actuators, and computing devices. Instead of depending on batteries, the robots will harness energy in the form of dissolved chemicals in the watery environments where they operate. Approximating the complexity of current macroscale wired robots, they will gather information from their environment—including chemical gradients and surface composition—and use the information to make decisions about movement and achieve set goals.
“Imagine the ability to build and program soft robots to organize cells and tissues for regenerative medicine, detect and target infections, or repair microscopic defects in machines,” said Schulman. “Our research addresses a fundamental problem that must be solved to develop these robots: how to build miniature autonomous devices capable of sensing, actuation, computation, and control inside or near the body.”
“We need to understand the mechanics of how small molecular changes can cause hydrogel structures to change shape and then how a sequence of shape changes can be transformed into large motion,” added Nguyen.
The approach builds on the team’s recent development of hydrogel devices, where swelling and contraction of specific domains is directed by short, synthetic DNA sequences, in addition to more than a decade of research on thermally responsive soft robots. The protocol enables the programming of a variety of robot motions necessary for organizing cells and tissues for regenerative medicine, detecting and targeting infections, destroying biofilms, and repairing microscopic defects in machines.
The researchers also plan to infuse elements of the research into undergraduate and graduate curricula in fields ranging from chemistry to computer science, and to initiate a K-12 robotics outreach program to teachers and students on how to program robots.